Published On Apr 28, 2016
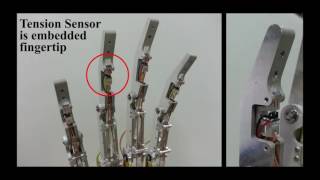
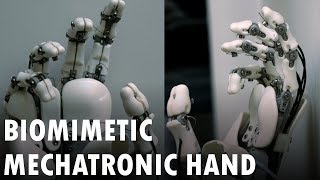
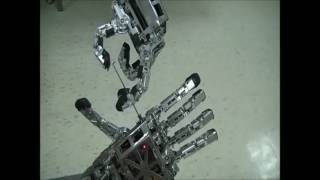
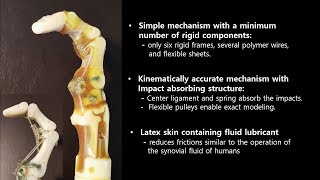
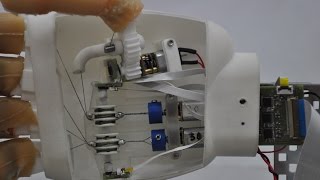
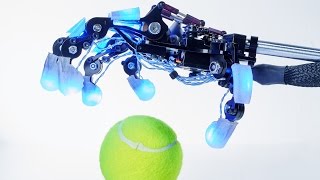
The ROBIOSS dexterous robot hand is a human sized robotic hand designed for adaptive grasping and inside hand manipulation. The hand with 16 joints and 4 fingers is fully actuated. The modular design of the finger offers high capabilities for collaborative robotics.
Reference paper : A New Dexterous Hand Based on Bio-Inspired Finger Design for Inside-Hand Manipulation, Hussein Mnyusiwalla ; Philippe Vulliez ; Jean-Pierre Gazeau ; Saıd Zeghloul, IEEE Transactions on Systems, Man And Cybernetics, Volume:PP Issue:99. 2016.
For any information, contact Jean-Pierre Gazeau from PPRIME Institute on ResearchGate.net
show more