
Published On Oct 17, 2022
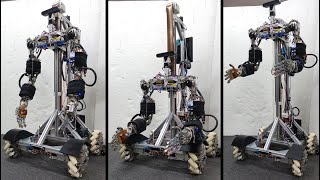
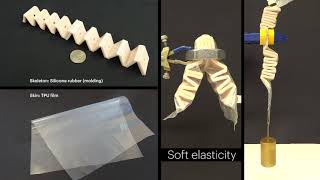
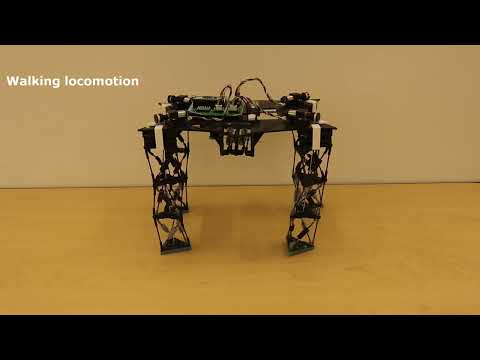
For robots to successfully locomote in different environments, it is better to equip them with multiple modes of locomotion. Multimodal locomotion for existing robotic systems is generally realized by integrating multiple mechanisms into a single robot. These robots are generally cumbersome or challenging to control and actuate. Recently, shape-morphing structures are utilized to enable reconfigurable and multifunctional robots. In this article, we present a novel origami-inspired module that can change its shape and motion. The modules consist of joints that can be individually controlled to be soft or rigid, allowing the modules to reconfigure under actuation. To understand the reconfiguration capability, we numerically analyzed the programmable shapes and motions for a module. Using the modules, we developed a reconfigurable robot with four legs, each made from four serially connected modules. The robot can walk, crawl, and inch using the same mechanical structure. We anticipate that the proposed method can be leveraged to enable robots with physical intelligence to adapt their morphologies (e.g., body shapes and leg orientations) and behaviors (i.e., locomotion modes) in response to external environments.
For more details, check out our paper published in IEEE/ASME Transactions on Mechatronics.
https://ieeexplore.ieee.org/abstract/...