
Published On Apr 4, 2024
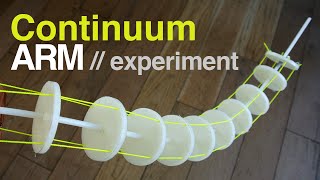
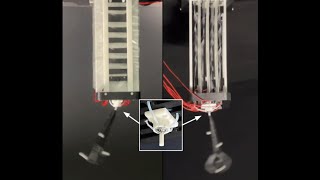
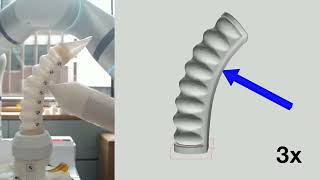
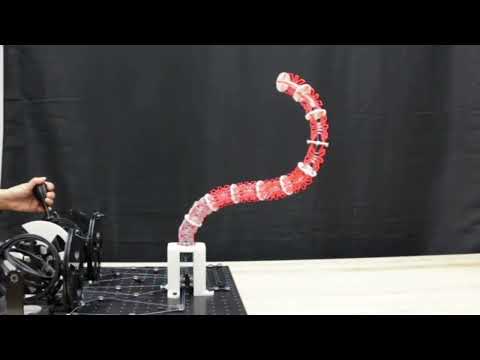
Puspita Triana Dewi, Priyanka Rao, and Jessica Burgner-Kahrs: A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots with Pre-Programmable Stiffness. IEEE International Conference on Soft Robotics , 2024.
show more